郭 超
(秦皇島威卡威汽車零部件有限公司,河北 秦皇島 066000)
摘 要:【目的】提高汽車行李架加工效率,設(shè)計(jì)一種機(jī)器人自動上下料裝置。【方法】通過研究機(jī)器人自動上下料工藝流程,對機(jī)器人自動上下料裝置進(jìn)行了整體設(shè)計(jì)。【結(jié)果】機(jī)器人自動上下料裝置利用儲料式傳送帶集中供料,對零件進(jìn)行傳送、分離、檢測后,機(jī)器人抓取和搬運(yùn),完成上料操作,將成品有序地放在下料車中,完成碼垛操作。【結(jié)論】采用工業(yè)機(jī)器人替代工人進(jìn)行上下料操作,車間生產(chǎn)狀態(tài)從一人操作一臺設(shè)備變成一人操作多臺設(shè)備,可降低人力成本,提高企業(yè)生產(chǎn)效率。
關(guān)鍵詞:工業(yè)機(jī)器人;自動上下料;汽車行李架;RobotStudio仿真;一鍵復(fù)位
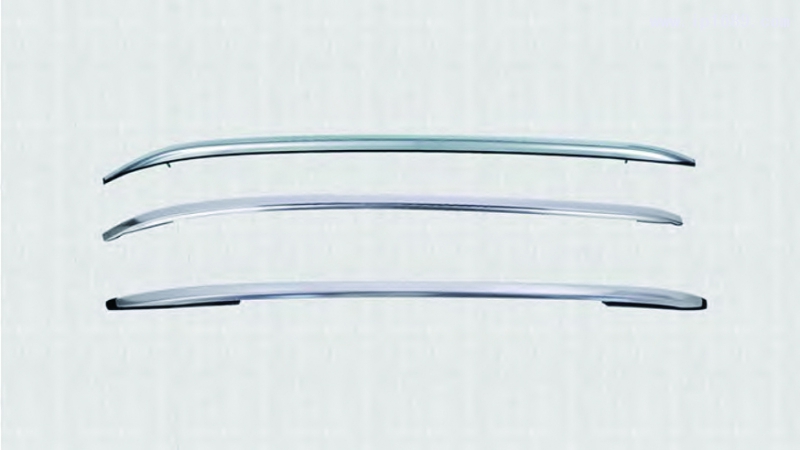
汽車行李架是安裝在汽車車頂上的支架,用于攜帶大件物品,如自行車、大件行李、帳篷等,增加了愛車的承載空間,成為越來越多的車主喜歡選裝的部件[1]。行李架的材質(zhì)多為鋁合金材料,有著較高的強(qiáng)度和硬度,在機(jī)加工成型的工序中,需要工人不斷重復(fù)單一的上下料操作進(jìn)行生產(chǎn),勞動強(qiáng)度大,消耗大量的人力成本,生產(chǎn)效率低。汽車行李架圖如圖 1所示。
圖1 汽車行李架圖
機(jī)器人技術(shù)是機(jī)械、電子、自動控制、人工智能等多學(xué)科領(lǐng)域知識交叉和融合的一門新興交叉學(xué)科[2]。近年來,工業(yè)機(jī)器人的技術(shù)水平持續(xù)提升,其憑借操作靈活、占地面積小、精度高和成本低等優(yōu)勢,被廣泛應(yīng)用在汽車制造、電子工業(yè)等領(lǐng)域[3]。汽車行李架機(jī)加工工序采用 PLC+HMI 架構(gòu)設(shè)計(jì),進(jìn)行程序邏輯控制,采集傳感器的輸入,控制伺服、氣缸等執(zhí)行機(jī)構(gòu)的輸出,通過工業(yè)機(jī)器人模擬工人的上下料動作,可實(shí)現(xiàn)行李架的自動抓取、搬運(yùn)、下料碼垛操作,將員工從重復(fù)和單一的工作中解放出來,有效降低了員工的勞動強(qiáng)度,改善了員工的作業(yè)環(huán)境,可提高企業(yè)生產(chǎn)效率,為促進(jìn)工廠的智能化和自動化發(fā)揮了重要作用[4]。
1 機(jī)器人自動上下料工藝流程
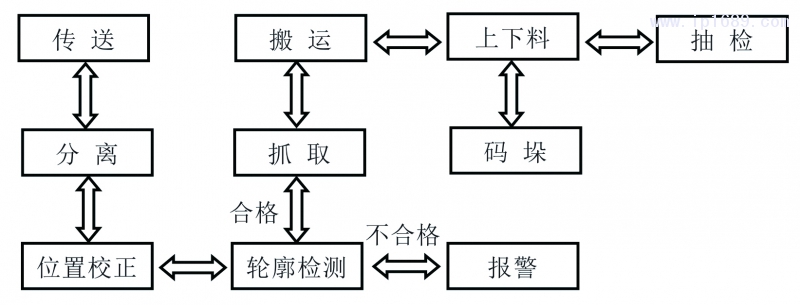
工藝流程圖如圖2所示。1)將待加工的零件集中放在上料傳送帶的隔斷內(nèi),伺服系統(tǒng)通過以太網(wǎng)連接PLC,按照人機(jī)界面上預(yù)先設(shè)定的參數(shù)配方,以位置控制模式帶動傳送帶向機(jī)器人方向轉(zhuǎn)動。2)當(dāng)傳送帶終端的紅外測距傳感器檢測到零件時,尼龍材質(zhì)的符形塊托起零件,利用零件本身的重力作用,在垂直方向?qū)α慵M(jìn)行位置校正,安裝彈簧緩沖機(jī)構(gòu)的氣缸側(cè)推工作,在水平方向?qū)α慵M(jìn)行二次定位校正,3D激光傳感器對零件側(cè)面進(jìn)行輪廓掃描,判斷零件是否上錯、放反,保證上料位置一致性,提高機(jī)器人自動上下料裝置的穩(wěn)定性。3)PLC通過射頻識別技術(shù)讀取機(jī)器人夾具上面的電子標(biāo)簽,采集工裝產(chǎn)品信息,轉(zhuǎn)換成數(shù)字產(chǎn)品代碼后,通過網(wǎng)絡(luò)將代碼發(fā)送給機(jī)器人,用來自動調(diào)用機(jī)器人的運(yùn)動軌跡任務(wù),當(dāng)傳感器檢測零件合格時,上料單元啟動機(jī)器人。4)機(jī)器人將待加工的零件放置在加工設(shè)備的上料位置,取走已加工完成的零件,同時啟動設(shè)備工作,按照碼垛程序的控制算法,將零件有序地放入下料小車對應(yīng)位置。5)MES系統(tǒng)對PLC進(jìn)行數(shù)據(jù)采集和信號連接,利用智能算法進(jìn)行生產(chǎn)、設(shè)備、質(zhì)量數(shù)據(jù)分析,并自動生成表格和圖形,以便進(jìn)行可視化管理[5]。
圖2 工藝流程圖
為提高設(shè)備利用率,機(jī)器人自動上下料裝置設(shè)計(jì)三個功能。1)抽檢不停機(jī)功能。由于下料車被安全護(hù)網(wǎng)圍在內(nèi)部,質(zhì)檢員在護(hù)網(wǎng)外部接觸不到零件,若進(jìn)入護(hù)網(wǎng)內(nèi)部取件,需要設(shè)備停機(jī),以保護(hù)人員安全,但會降低設(shè)備生產(chǎn)效率。抽檢功能只需要員工觸發(fā)抽檢按鈕,機(jī)器人自動將加工完成的零件放在下料傳送帶上,傳出防護(hù)網(wǎng)外。2)換車不停機(jī)功能。當(dāng)下料車碼垛裝滿時,蜂鳴器報(bào)警,設(shè)備繼續(xù)進(jìn)行生產(chǎn),機(jī)器人自動切換下料軌跡,將零件放在下料傳送帶上,換車完成后,員工觸發(fā)啟動按鈕,機(jī)器人自動切換到下料車碼垛軌跡。3)機(jī)器人一鍵復(fù)位功能。當(dāng)設(shè)備出現(xiàn)故障停機(jī)時,若機(jī)器人沒有停在待機(jī)起始位置,以往需要員工手動操作示教器來復(fù)位機(jī)器人,步驟繁瑣,對員工技能要求高,一鍵復(fù)位功能可以通過按住復(fù)位按鈕,機(jī)器人自動調(diào)用復(fù)位程序,判斷停止位置,規(guī)劃復(fù)位軌跡,回到待機(jī)位置,操作簡單方便。
2 整體系統(tǒng)設(shè)計(jì)
機(jī)器人自動上下料裝置分為主體設(shè)備和產(chǎn)品工裝兩部分,通過更換產(chǎn)品工裝,主體設(shè)備可以實(shí)現(xiàn)對不同規(guī)格零件的加工,以此適應(yīng)市場上產(chǎn)品多樣化和個性化的需求。主體設(shè)備由工業(yè)機(jī)器人、上料單元、下料單元、電控系統(tǒng)四部分組成,設(shè)備實(shí)際效果圖如圖3所示。
圖3 設(shè)備實(shí)際效果圖
2.1 工業(yè)機(jī)器人選型
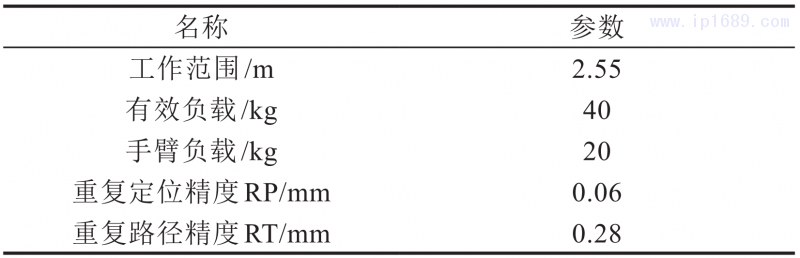
工業(yè)機(jī)器人在自動上下料裝置中的主要應(yīng)用為搬運(yùn)和碼垛操作,選型的依據(jù)和重點(diǎn)是動作范圍、有效負(fù)載和重復(fù)定位精度。IRB 4600-40/2.55 是 ABB公司開發(fā)的高效通用型機(jī)器人,裝配性能優(yōu)異的IRBP變位機(jī)和IRBT軌跡運(yùn)動系統(tǒng),增強(qiáng)了機(jī)器人對目標(biāo)應(yīng)用的適應(yīng)能力,纖巧的機(jī)身使其在避繞障礙物時,可以保持最高加速度,循環(huán)周期時間短。IRB 4600的規(guī)格參數(shù)如表1所示。
表1 IRB 4600的規(guī)格參數(shù)
2.2上料單元設(shè)計(jì)
上料單元設(shè)計(jì)采用儲料式傳送帶的形式,集中供料,可以滿足50件待加工零件的同時擺放,皮帶上的橫條用于隔斷相鄰的兩個零件,便于零件的分離操作,皮帶支架固定在花軸上,通過軸承在花軸上的移動,調(diào)節(jié)兩側(cè)支架的間隔,使上料單元可以兼容長度在1.8 m~2.8 m范圍內(nèi)的零件,利用傳送帶兩側(cè)的導(dǎo)向板,對移動的零件進(jìn)行左右方向校正,降低人工零件擺放的位置精度要求。下料傳送帶固定在上料單元的上方,用于抽檢和換車下料,上下料在一側(cè)的設(shè)計(jì),可以有效減少員工的頻繁走動,下料傳送帶的皮帶電機(jī)為220 V調(diào)速電機(jī),通過旋轉(zhuǎn)調(diào)速旋鈕可以控制皮帶轉(zhuǎn)速,防止速度過快,導(dǎo)致成品件堆放,造成零件表面磕碰劃傷。
2.3 下料單元設(shè)計(jì)
下料單元由下料小車和小車固定機(jī)構(gòu)兩部分組成,由于不同型號的汽車行李架形狀相似,所以下料小車設(shè)計(jì)成通用形式,即不同型號的行李架共用一種下料車,可以降低產(chǎn)品的生產(chǎn)成本。小車的車身結(jié)構(gòu)是方鋼焊接成型,結(jié)構(gòu)簡單,牢固耐用,使用耐磨的布料包裹車身,防止小車運(yùn)輸零件時產(chǎn)生劃傷。小車固定機(jī)構(gòu)具有導(dǎo)向、定位和鎖死功能,利用電容式傳感器檢測下料小車的擺放位置,保證每次換車操作后,下料車位置的一致性。
2.4 電控系統(tǒng)設(shè)計(jì)
選用羅克韋爾1769-L30ERM型號的CPU作為電控系統(tǒng)的PLC,進(jìn)行程序控制、信號采集、數(shù)據(jù)處理和故障診斷;選用羅克韋爾2711P-T6C21D8S型號的觸摸屏作為人機(jī)界面,用于設(shè)定伺服參數(shù)、手動操作HMI上的虛擬按鈕、顯示設(shè)備報(bào)警[6];選用易福門AC1421型號的以太網(wǎng)IP網(wǎng)關(guān)配置AS-i從站,控制分布式I/O,與行李架加工設(shè)備進(jìn)行通信,采集傳感器輸入,控制電機(jī)和氣缸等執(zhí)行器機(jī)構(gòu)輸出;選用羅克韋爾Kinetix350型號的單軸驅(qū)動器控制伺服電機(jī)工作,驅(qū)動器與電機(jī)間用兩根電機(jī)線相連接,紅色的電機(jī)線提供電源,綠色的電機(jī)線傳遞電機(jī)編碼器信號,PLC執(zhí)行MAM控制命令,使伺服電機(jī)按設(shè)定的絕對位置轉(zhuǎn)動,每當(dāng)上料傳送帶旋轉(zhuǎn)一周時,伺服電機(jī)的位置值自動歸零,防止出現(xiàn)累計(jì)誤差;選用易福門ANT513型號的RFID讀寫頭,識別機(jī)器人夾具上的E80371型號的RFID標(biāo)簽,標(biāo)簽里寫有當(dāng)前工裝的ID信息,PLC將其與切換工裝時選擇的產(chǎn)品信息做比較,以驗(yàn)證當(dāng)前工裝是否配方選擇錯誤,同時將產(chǎn)品代碼傳送給機(jī)器人,機(jī)器人利用TEST語法結(jié)構(gòu)來選擇當(dāng)前產(chǎn)品對應(yīng)的上下料程序[7];利用MES系統(tǒng)對PLC進(jìn)行設(shè)備產(chǎn)量、運(yùn)行時間、異常報(bào)警等數(shù)據(jù)采集,通過智能算法的邏輯計(jì)算,轉(zhuǎn)換成可視的圖形和報(bào)表,進(jìn)行監(jiān)控和管理[8]。開通ABB機(jī)器人EtherNet/IP通信協(xié)議,將機(jī)器人的EDS文件通過Studio5000軟件導(dǎo)入PLC中,使PLC與機(jī)器人建立硬件組態(tài),實(shí)現(xiàn)32個字節(jié)長度的以太網(wǎng)通信;開通ABB機(jī)器人DeviceNet協(xié)議,使用DSQC652型號信號板連接機(jī)器人夾具I/O信號,控制真空吸盤和氣缸夾爪動作。硬件網(wǎng)絡(luò)圖如圖4所示。
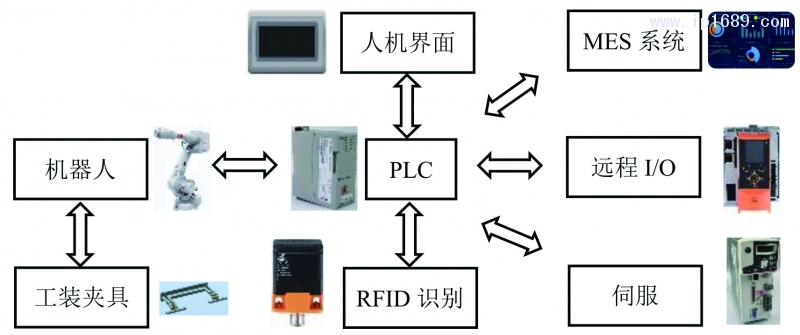
圖4 硬件網(wǎng)絡(luò)圖
2.5工裝夾具設(shè)計(jì)
通用型工裝夾具可靠性低,夾持精度不高,影響行李架上料穩(wěn)定性,所以將上料傳送帶的定位機(jī)構(gòu)和機(jī)器人夾具設(shè)計(jì)成專用型工裝,不同型號的行李架需要開發(fā)對應(yīng)形狀和尺寸的工裝[9]。定位機(jī)構(gòu)有零件分離、位置校正、輪廓檢測功能,是通過水平和垂直方向的氣缸運(yùn)動,以及3D激光輪廓傳感器檢測來實(shí)現(xiàn)的。機(jī)器人夾具結(jié)構(gòu)簡單,使用定位銷和螺絲與機(jī)器人六軸法蘭相連接,降低工裝硬件成本,夾具的執(zhí)行機(jī)構(gòu)由真空吸盤和氣爪組成,利用真空發(fā)生器產(chǎn)生真空壓力,將行李架吸附在夾具上,利用氣爪運(yùn)動,鎖緊行李架位置[10]。
3機(jī)器人程序開發(fā)
3.1機(jī)器人軌跡仿真
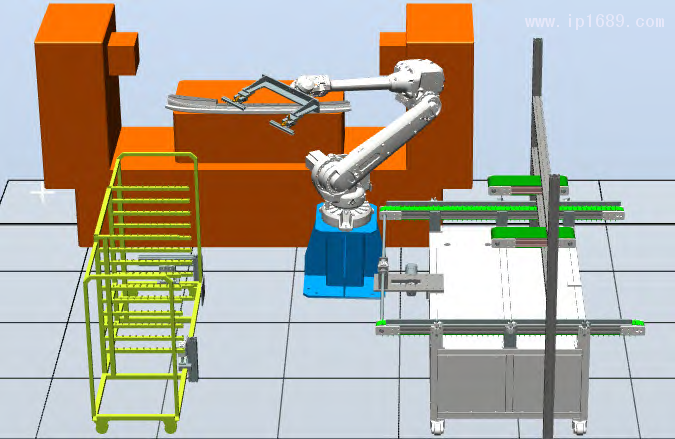
機(jī)器人仿真圖如圖 5 所示。機(jī)器人程序開發(fā)有手動示教和離線仿真兩種方式,手動示教是在現(xiàn)場環(huán)境,手持示教器操作機(jī)器人移動,記錄軌跡位置、編寫邏輯;離線仿真是在軟件里建模,模擬機(jī)器人工作,編寫動作程序。機(jī)器人自動上下料裝置利用ABB公司開發(fā)的RobotStudio軟件對其進(jìn)行離線仿真[11]。1)創(chuàng)建一個空的工作站,在模型庫中選擇IRB 4600-40/2.55機(jī)器人模型,并將其導(dǎo)入工作站中。2)選擇“從布局”方式創(chuàng)建機(jī)器人系統(tǒng),設(shè)置機(jī)器人的RobotWare的版本,配置系統(tǒng)參數(shù),如添加840-1 EtherNet/IP Anybus Adapter、608-1 World Zones、617-1 FlexPendant Interface等功能。3)將SolidWorks軟件設(shè)計(jì)的上下料主體設(shè)備和產(chǎn)品數(shù)模,以stp格式幾何體導(dǎo)入系統(tǒng)中,按照設(shè)計(jì)布局,擺放各裝置的位置。4)定義工具數(shù)據(jù),將機(jī)器人夾具的質(zhì)量和重心位置等參數(shù)保存在tooldata中,定義負(fù)荷數(shù)據(jù),將行李架質(zhì)量和重心保存在loaddata中,分別在上料傳送帶、加工設(shè)備和下料小車三個位置定義工件坐標(biāo),保存在wobjdata中。5)將機(jī)器人運(yùn)動曲線生成軌跡指令,配置軸參數(shù),仿真運(yùn)行機(jī)器人的上下料操作,檢測機(jī)器人是否發(fā)生碰撞[12]。
圖5 機(jī)器人仿真圖
3.2機(jī)器人一鍵復(fù)位程序開發(fā)
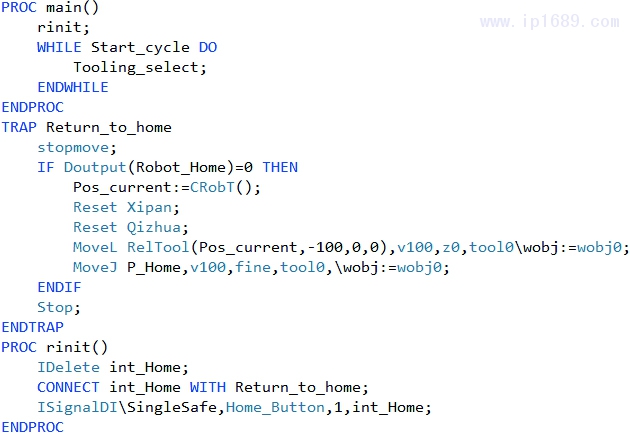
現(xiàn)場異常觸發(fā)機(jī)器人故障停機(jī),需要設(shè)備具有一鍵復(fù)位功能,快速恢復(fù)正常生產(chǎn)。創(chuàng)建初始化程序rinit(),并添加在主程序main()中,刪除中斷連接,將中斷字符int_Home和中斷程序Return_to_home相關(guān)聯(lián),將輸入信號Home_Button與中斷字符int_Home相關(guān)聯(lián),當(dāng)按住Home_Button按鈕時,觸發(fā)中斷程序執(zhí)行。機(jī)器人停止移動,獲取機(jī)器人當(dāng)前位置,并保存到變量P_Home中,清除真空吸盤工作指令,清除氣爪工作指令,機(jī)器人放下夾具中的零件,在x方向以直線運(yùn)動指令移動-100距離,在y方向和z方向保持不變,用于安全避讓,然后回到Home位置,機(jī)器人停止。機(jī)器人自動復(fù)位程序圖如圖6所示。
4結(jié)語
利用上料單元對加工零件進(jìn)行存儲、傳送、分離、定位、檢測,IRB4600工業(yè)機(jī)器人抓取和搬運(yùn)零件進(jìn)行上下料操作,在下料單元進(jìn)行有序的碼垛操作,完成成品存儲,設(shè)計(jì)出一種用于汽車行李架加工的機(jī)器人自動上下料裝置。通過RobotStudio軟件對機(jī)器人動作進(jìn)行虛擬仿真,簡化開發(fā)和設(shè)計(jì)流程,通過機(jī)器人一鍵復(fù)位功能,降低設(shè)備操作復(fù)雜度。采用工業(yè)機(jī)器人替代工人進(jìn)行上下料操作,車間生產(chǎn)狀態(tài)從一人操作一臺設(shè)備變成一人操作多臺設(shè)備,可降低人力成本,提高生產(chǎn)效率,為增強(qiáng)企業(yè)競爭力提供了可靠支持。
圖6 機(jī)器人自動復(fù)位程序圖
參考文獻(xiàn):
[1] 王亞運(yùn),楊杰.用于汽車行李架的一體式嵌件螺母[J].汽車與配件,2021(17):67-69.
[2] 胡艷琳.基于PLC控制的物料檢測分類放置工業(yè)機(jī)器人系統(tǒng)研究與設(shè)計(jì)[D].河北:河北科技大學(xué),2020:1-7.
[3] 郭文豪. 基于等離子堆焊機(jī)器人工藝過程的動力學(xué)研究[D].遼寧:沈陽工業(yè)大學(xué),2022:43-44.
[4] 王曉燕.基于PLC的液晶玻璃基板自動上料控制系統(tǒng) [J].兵器裝備工程學(xué)報(bào),2020,41(9):176-181.
[5] 廖能解,馬平,歐建國,等.上下料桁架機(jī)器人控制系統(tǒng)設(shè)計(jì)[J].機(jī)械設(shè)計(jì)與制造,2020(12):171-175.
[6] 劉恒超.基于AB PLC和工業(yè)機(jī)器人的汽車天窗自動排序上料系統(tǒng)設(shè)計(jì)[J].制造業(yè)自動化,2022,44(12):102-106.
[7] 楊亞,范琳琳.RFID 技術(shù)在 PLC自動化系統(tǒng)中的集成應(yīng)用[J].工業(yè)控制計(jì)算機(jī),2022,35(11):10-12.
[8] 張明月,賀福強(qiáng),李思佳,等.基于MES系統(tǒng)的印刷工藝能耗管控研究[J].制造業(yè)自動化.2023,45(5):36-39.
[9] 魯霞,吳卓明.一種工業(yè)機(jī)器人多功能夾具[J].機(jī)床與液壓,2020,48(1):113-115.
[10] 楊昆,王艷春,郭湖東,等.面向3C自動化生產(chǎn)線的裝配工業(yè)機(jī)器人多功能組合夾具設(shè)計(jì)[J].科學(xué)技術(shù)創(chuàng)新,2019(29):105-106.
[11] 樊琛,朱致遠(yuǎn),顏遠(yuǎn)遠(yuǎn).基于RobotStudio的分類碼垛工作站仿真研究[J].制造業(yè)自動化,2023,45(7):61-66.
[12] 趙偉博,李琳杰,齊鍇亮. 基于RobotStudio的機(jī)器人上下料工作站設(shè)計(jì)與仿真 [J].計(jì)算技術(shù)與自動化,2021,40(4):21-25.





















 玻纖含量對長玻纖...
玻纖含量對長玻纖... 鈣鈦礦薄膜的均勻...
鈣鈦礦薄膜的均勻... 用于光伏板靜電除...
用于光伏板靜電除...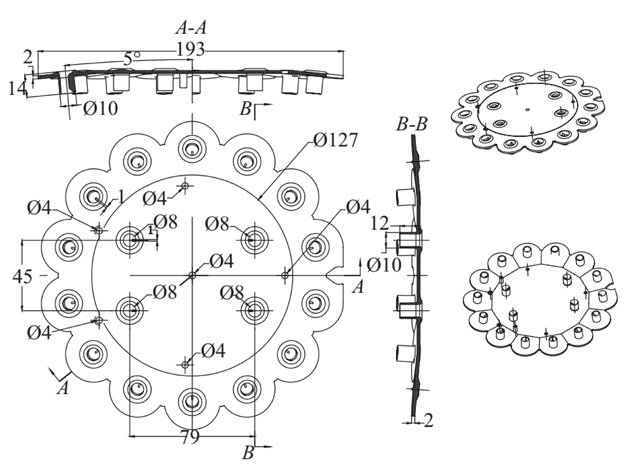 聚砜醫(yī)療干粉吸入...
聚砜醫(yī)療干粉吸入...





