王驚雷
(河南省洛陽經濟學校,河南洛陽471000)
摘要:針對傳統模糊控制器控制過程復雜,很大程度依賴專家經驗等缺點,結合全自動注射機的工作特點,提出基于差分進化算法的模糊控制方案。采用Matlab搭建實驗仿真平臺,對于全自動注射機溫度控制系統進行實驗設計,同時對于控制器進行驗證分析。仿真結果表明,基于差分進化算法的模糊控制器具有較好的抗干擾性、穩定性,在全自動注射機溫度控制中,相對傳統模糊控制器,其恒定性和魯棒性控制效果更加良好。基于差分進化算法的模糊控制器應用于全自動注射機溫度控制系統,能更大程度上提高系統性能與溫度控制精度,進而提升產品質量。
關鍵詞:差分進化;模糊控制器;全自動注射機;溫度控制
隨著塑料工業的迅速發展,塑料制品在航空、航天、電子、機械、船舶和汽車等領域廣泛應用。注塑設備是生產各種工業產品的重要工藝裝備[1],而控制系統是注塑設備中最為關鍵的部分。目前,傳統的模糊控制器過于依賴人工經驗,控制精度低,控制效果不理想,無法很好地滿足高精度控溫要求。為進一步提升系統控制精度,提升注塑產品質量,本實驗采取基于差分進化算法的模糊控制器,應用于全自動注射機溫控系統中,對系統的控制精度進行探究。
1注射機工藝概述
目前塑料工業中所應用的注射機,根據注塑缸的數目可分為單缸注射機和雙缸注射機。單缸注射機,除去對射機的使用,單獨使用一個射臺成為單色機型,配以M3700高速射臺,射速可達250mm/s;配以E1400H全電射臺,射速可達300mm/s。雙缸注射機特點為雙缸直壓式縮模,模面受力均勻,低壓關模平穩且快速,通常采用節能油泵。同時采用箱體式前模板,內部加強筋分布合理,移動模板更加扎實。
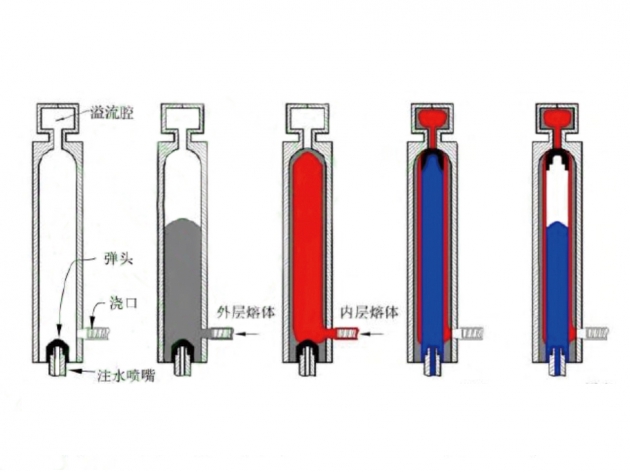
工業生產過程中采用的自動注射機的注塑成型加工過程較為復雜,對于工藝要求精度較高。通常意義上,自動注射機的工作流程主要包含四個主要階段:(1)材料熔融與填充階段;(2)模具保壓階段;(3)模具冷卻階段;(4)開模與成品階段。由于不同材料的物理化學屬性對于注塑過程中的工藝參數不盡相同,但為了更好地確保注塑模具的質量,通常需要對于注射溫度進行較為精準的控制。
注射機的溫度控制部分主要由料筒溫度和模具溫度組成,膠料的內在塑化效果受料筒溫度影響,注塑半成品表面的光滑度受模具溫度影響[2]。國內外大多數廠商采用的注射機溫控系統一般包含兩個子系統,分別為閉路水循環系統和電控系統。水循環由一路熱水和一路冷水組成,在料筒外部流道流動。電控系統由電加熱器以及換熱器組成,電加熱器把水加熱到設定溫度,冷卻水經過換熱器進行熱量轉換。通過熱傳導控制啟動時模具部分的預熱,保持塑化過程的溫度恒定[3]。
2注射機溫度控制策略
目前國內大多數的全自動注射機采用模糊控制的溫度控制方案,在塑料的塑化過程中,塑料半成品的質量直接受溫度的影響。溫度過低,塑料表面不光滑,物理性能較差,甚至出現無法成型的狀況。溫度過高則會出現氣泡,嚴重時會導致膠料燒焦。因此,對膠料溫度的精確控制是加工生產線的第一要務[4]。目前,隨著工藝的升級與進步,對于溫度控制精度提出了新的要求,采用模糊控制器難以實現對于注射機溫度的精準控制。但是塑料在塑化過程中,溫度受注射壓力變化,保壓時間調整,材料塑化程度等因素影響難以取得較為良好的溫度控制效果。熔料溫度的獲取可以通過在噴嘴部分安裝溫度傳感器,實現對于熔體溫度的測量。
注射機溫控系統比較復雜,具有時變性,滯后時間大。模糊PID控制過于依賴人工經驗,控制精度低,控制效果不理想,無法很好地滿足高精度控溫要求[5]。模糊控制系統是通過對輸入量進行模糊化處理,選擇合適的由人工經驗得出的模糊規則表進行模糊推理,得到模糊量后進行清晰化輸出。模糊PID控制是將模糊控制與PID控制器相結合,在線整定PID的參數,圖1為模糊PID控制原理圖。
從圖1可以看出,根據模糊邏輯推理實現對PID參數的自適應整定與調節。其中,系統誤差(e)和誤差變化率(ec)為模糊控制器的輸入量,代表溫度偏差和偏差變化率;ΔKp、ΔKi、ΔKd為輸出量,代表PID控制器三個參數Kp、Ki、Kd的校正量;系統輸入r(t)為橡膠料筒溫度的設定值;y(t)為實際檢測到的溫度值。將其清晰化后與初始PID參數疊加,根據系統偏差和偏差變化率的不斷變化而變化[6]。
輸入變量和輸出變量模糊論域的子集為{NB(負大),NM(負中),NS(負小),ZO(零),PS(正小),PM(正中),PB(正大)},e和ec的論域取{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6},圖2為輸入與輸出變量的隸屬函數采取的三角函數形式。
目前塑料工業應用中,采用模糊PID控制器的溫度控制系統應用廣泛。乙基纖維素、聚氯乙烯、磷酸三氯乙酯等,在其加工生產過程中都需要有較為精準的溫度控制,同時全自動注射機生產過程中對溫度有嚴格的控制要求[7],傳統的溫度控制方法通常運用模糊PID控制器進行控制。但對于注塑過程的溫度控制系統,由于其控制系統的復雜性,且為實現高控制精度和效果的要求,使用常規控制器已經不容易產生優良的控制效果[8]。
3差分進化算法的模型與應用
差分進化算法又稱為DE算法,本質上是一種多目標優化的算法,在算法優化中應用較為廣泛。差分進化算法借鑒遺傳算法中種群進化思想,通過種群的初始化、交叉變異等操作,實現對于最優解的尋找[9]。圖3為差分進化算法原理圖。
根據原理圖對于算法步驟進行詳細描述:
第一步,種群的初始化。初始算法的參數,種群數量規模為:
根據公式(1)有效確定種群規模,對于總體大小M的值,種群規模的大小對于種群多樣性具有較大的影響,但是種群規模過大又會影響算法的收斂速度[10]。
第二步,種群變異操作。首先在種群中挑選3個不同種群個體xp1,xp2,xp3進行如下操作:
變異因子是算法中的重要參數,用于控制種群的變異特征以及種群多樣化的實現,對于種群進一步的進化,最優解的生成具有重要影響。
第三步,交叉。為了增加種群多樣性,操作如下:
式(3)中:CR∈[0,1]為交叉概率。交叉概率對于算法尋優過程中,收斂速度的快慢具有重要作用。倘若交叉概率過小,使得種群多樣性降低,算法收斂速度便慢。但是過大的交叉概率又會使算法對于全局最優解不夠敏感,并導致控制收斂效果變慢。
第四步,對下一代種群個體進行選擇。通過函數進行計算同時確定xi(t)為下一代的子個體:
差分進化算法為優化算法,在控制領域應用較為廣泛。算法吸收了種群進化的優勢與特點,進一步幫助控制器跳出當前局部最優值,通常根據算法收斂性分析,進一步證明算法進一步收斂到最優值的有效性[11]。圖4為差分進化算法的模糊控制器原理圖。
利用差分進化算法優化PID參數的具體步驟為:
(1)首先定義Kp,Ki,Kd三個數值的范圍;
(2)算法的初始化,初始化各項參數;
(3)種群個體根據適應度函數進行尋優,確定出系統誤差最小的Kp,Ki,Kd三個數值;
(4)種群進行交叉、變異等操作,進一步產生新的種群;
(5)迭代步驟(2)~(4),直到參數收斂到最小數值。
4基于差分進化算法的模糊控制器設計實現
為驗證基于差分進化算法的模糊控制器的有效性,采用Matlab搭建實驗仿真平臺對于全自動注射機溫度控制系統進行實驗設計,同時對于控制器進行驗證分析。通過Simulink對所設計的全自動注射機溫度控制系統進行仿真驗證,并對系統性能進行分析。建立基于差分進化的模糊控制器與模糊PID控制器的自動注射機溫度控制仿真模型。控制器設計是結合差分進化算法的尋優思路,結合工業生產過程中注射機溫度控制經驗以及模糊控制器的理論特點,表1~表3為設計的模糊規則。圖5為差分進化參數尋優過程。
采用60℃的期望信號進行輸入測試,圖6為控制器仿真測試對比試驗。從圖6可以看出,兩種算法上升的時間相同,模糊PID控制算法的最高上升溫度為68.29℃,較大,基于差分進化算法的模糊控制器的最高上升溫度為62.16℃,調節時間比模糊PID控制少,呈現顯著的優越性,控制效果顯著提升。
由于自動注射機在實際生產應用中會面臨著功率加熱器更換、誤故障或者電機誤操作等情況,通常在設計控制器時要進行外來擾動的測試與試驗。為更好地驗證控制器的性能,在進行控制器仿真測試對比試驗中,考慮加入外來擾動環節,進一步觀察控制器的控制效果。圖7為控制器仿真測試對比試驗(帶擾動)。從圖7可以看出,基于差分進化算法的模糊控制器系統上升時間較短,系統對于外來擾動能夠迅速恢復,可以較好地實現溫度控制。
5結論
針對全自動注射機溫度控制系統具有非線性,時變性以及大時滯問題,選取料筒溫度作為被控對象,采取模糊PID控制算法、差分進化算法-模糊控制算法。同時,對于全自動注射機溫度控制系統,分別設計了基于模糊PID、基于差分進化的模糊控制器,并在Matlab軟件上進行了仿真實驗。對比分析研究結果可以發現,與常規模糊PID控制器相比,基于差分進化的模糊PID控制器有效降低了系統的超調量以及調節時間,具有良好的控制質量,在加入擾動后,能夠迅速尋找到最優控制參數,控制器仍然具有良好的控制效果。
參考文獻
[1]李村.注射機料筒溫度控制設計與研究[D].昆明:昆明理工大學,2011.
[2]湯霽驍,朱茂桃,吳蕾.基于Moldflow和代理模型的注塑工藝參數優化[J].塑料科技,2019,47(6):99-103.
[3]陳以,楊啟偉.模糊Smith智能溫度控制器的設計與仿真[J].控制工程,2007(4):422-425,429.
[4]陳想,陳波宇.頻率和溫度對簾線與膠料動態粘合性能的影響[J].輪胎工業,2020,40(6):42-44.
[5]彭勛.一種自適應模糊PID節能控制的改進研究與仿真[J].計算機仿真,2016(12):333-337.
[6]黃偉,巫茜.基于參數自整定的模糊PID控制器及其應用[J].機床與液壓,2013(6):81-86.
[7]宋超,曹翱,溫家璽.自適應模糊PID控制器的設計及MATLAB仿真[J].現代制造技術與裝備,2018(7):210-212.
[8]申靜.塑料吹膜機的模糊PID溫度智能自動控制[J].合成樹脂及塑料,2019,36(2):82-85.
[9]倪洪杰,彭春祥,周曉根,等.一種階段性策略自適應差分進化算法[J].計算機科學,2019,46(S1):106-110.
[10]丁青鋒,尹曉宇.差分進化算法綜述[J].智能系統學報,2017,12(4):431-442.
[11]周偉,譚振江,朱冰.基于差分進化算法的大數據智能搜索引擎研究[J].情報科學,2018,36(5):87-91.




















 玻纖含量對長玻纖...
玻纖含量對長玻纖... 鈣鈦礦薄膜的均勻...
鈣鈦礦薄膜的均勻... 用于光伏板靜電除...
用于光伏板靜電除... 聚砜醫療干粉吸入...
聚砜醫療干粉吸入...





