田延娟
山東電子職業技術學院,山東 濟南 250014
摘 要:針對塑料管材切割過程,提出一種基于單片機控制的自動切割同時進行校驗的技術研究方案。該方案主要基于單片機程序進行切割動作的控制,以紅外傳感為輔助判斷切割動作是否完成,從而保證切割動作正常執行。實驗結果表明:該自動切割系統很好地滿足了切割過程的需求,保證了切割動作的準確度和精確度,對于塑料管材自動切割技術的研究有一定指導意義。
關鍵詞: 單片機;塑料管材;紅外傳感;自動切割
隨著塑料工業的持續發展,人們對于塑料產品的質量提出了更高的要求,而隨著城市化步伐的加快,對于塑料產品的需求也日益增長[1-3]。為此,我國塑料制品行業不斷進行產業結構調整、優化和轉型,呈現出蒸蒸日上的發展趨勢,但與發達國家相比,我國塑料制品生產企業的制造工藝、生產效率、產品質量仍然存在一定差距,這些問題有待于進一 步解決,以提高我國塑料企業的持續競爭力。塑料管材是塑料產品的重要組成部分,其制造工藝的發
展對于塑料行業非常重要。而塑料管材制造中的一個重要環節就是管材切割,它屬于管材制造的最后一個環節,直接關乎產品的外觀和精度[4-5]。本研究提出了一種基于單片機控制的自動切割(同時進行校驗)技術方案,該方案的切割動作通過單片機程序進行控制,同時以紅外傳感為輔助判斷切割動作是否完成,從而保證切割動作的正常執行[6-8]。
1 系統設計
1.1 設計思路
本研究選用易于操作和編程的單片機為系統控制核心,以紅外傳感技術為檢測方式,通過液晶 屏與報警裝置的搭配使用實現對自動切割過程的狀態判斷顯示[9-10]。該自動切割系統的設計原理為:(1)根據產品設計需求,使用單片機進行編程,控制切割工具進行切割;(2)切割動作完成之后,單片機根據傳回的紅外傳感信號進行動作判斷并在液晶 屏顯示,若切割正常則發出指令控制生產線繼續運 行,并進行下一次切割動作,若不正常則進行報警。 系統框圖設計如圖1所示。
1.2 硬件設計
本設計的硬件選型分析包括紅外傳感、單片機、切割電機、液晶屏及報警裝置。紅外傳感主要用于對切割元件切割處判斷是否切割完成,選取型號為QT30CM的對射式光電開關紅外傳感器(NPN 三線常開型),其工作電壓(直流)為5 V,無遮擋時輸出信號為低電平,加1 kΩ上拉電阻即可與單片機進行通信,滿足系統設計需求[11-13];單片機選取宏晶公司STC15W4K32S4系列單片機,具有大容量、 高速度、低功耗的優點,且采用了高速模數轉換器 (ADC),其性能完全符合系統設計需求[14-15];切割工具通常采用高功率電機,由于切割精確度的設計要求,本研究將選取小型步進電機進行設計,該電機型號為57BYG250B,輸出力矩1.2 N·m、輸出電流3 A,其功率能夠滿足系統設計需求[16];報警裝置選取高電平信號觸發繼電器來模擬報警;液晶屏主要用來顯示切割動作的狀態,本設計選取LCD12864液晶顯示屏,其具有操作簡單、控制方便的特點,滿足系統設計需求[17-18]。
1.3 工作流程設計
硬件選型后,對系統工作流程進行設計(如圖2所示):(1)啟動系統,單片機開始工作,連接于單片機輸入端的對射式紅外傳感器向單片機持續傳送信號,單片機程序根據紅外傳感信號判斷工件是否就位(即起始端是否到達切割開始位置),判斷正常后開始切割動作;(2)根據對射式紅外傳感信號判斷切割動作完成度,當接收到所有傳感器(安裝于工件上下處)的低電平信號時,表明工件切割完成;
(3)每完成一次切割動作,單片機即通過液晶屏對當前狀態進行顯示,同時進行一次計數,并判斷整個管材是否切割完成,在此過程中若出現切割異常情況,則會啟動報警裝置。
2 實驗設計及結果分析
2.1 實驗設計
在硬件選型與系統流程設計之后,將進行實驗平臺搭建設計。由于實驗條件的限制,將選取直徑分別為20、32、40、50 mm的4種家用塑料PVC管材進行系統可靠性驗證(傳感器組數根據直徑分別設為3、4、5、6);同時每種管材需設置不同的截取長度,從而通過所獲數據對切割系統的精確度進行驗證。
2.2 系統穩定性測試與數據分析
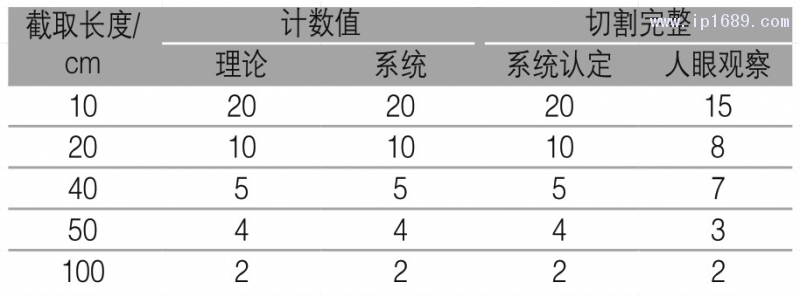
將每組實驗的管材長度均統一為2 m,且進行5種截取長度設置,分別為10、20、40、50、100 cm。由于各組實驗的管材截取長度及管材直徑均不相同,故需對程序進行不斷修正,從而驗證不同情況下的系統可靠程度,結果如表1~表4所示。
由表1數據可知,對于直徑20 mm的管材,系統計數值與理論計數值完全一致,而系統認定的切割完整(數量)與人眼觀察的結果存在一定差異。
由表2數據可知,對于直徑32 mm的管材,系統計數值與理論計數值完全一致,而系統認定的切割完整與人眼觀察結果亦存在一定差異,且該差異比表1更大。
由表3數據可知,對于直徑40 mm的管材,系統計數值與理論計數值完全一致,系統認定的切割完整與人眼觀察結果存在一定差異,而該差異比表1、表2更大。
由表4數據可知,對于直徑50 mm的管材,系統計數值與理論計數值完全一致,系統認定的切割完整與人眼觀察結果存在一定差異,而該差異比表1、表2、表3更大。
以上4組實驗中,系統對次數的認定與理論次數相同,但系統認定的切割完整數量要高于人眼觀察的結果。隨著管徑的增加,系統認定的切割完整量與人眼觀察結果的差值明顯增大;隨著切割次數的增加(即切割長度減小),系統認定的切割完整量與人眼觀察結果的差值明顯增大。實驗數據證明,系統的判斷明顯優于人眼觀察,且系統認定準確率很高,滿足設計要求。
3 結論
本設計的自動切割系統能夠滿足塑料管材切割過程的需求,其切割動作具有良好的準確度和精確度,對塑料管材自動切割技術研究有一定參考意義。
參考文獻:
[1] 法國推出大型泡沫切割機[J]. 新材料產業, 2003(7): 56.
[2] 烏力吉(編譯). 塑料激光切割機[J]. 橡 塑 機 械 時 代, 2007, 19(7): 8.
[3] 劉金龍. 塑料管材切割機的設計[J]. 科技資訊, 2013(4): 114.
[4] 張建均,金梅達,謝細三,等. 塑料管材的切割修邊機: 中國,104128950A[P]. 2014-11-05.
[5] 譚建斌. 基于PLC的醫療廢棄塑料制品回收處理系統研究[J]. 塑料工業, 2018, 46(10):88-90.
[6] 山東陸宇塑膠工業有限公司. 塑料管材橫向切割旋轉固定裝置:中國, 205111962U[P]. 2016-03-30.
[7] Hout J V,趙雪芹. 激光在移動塑料上切割正圖[J]. 光電子技術與信息, 1989(5): 33-34.
[8] 秦慶麗. 門窗塑料異型材切割長度不穩因素簡析[J]. 科技視界,2011(22): 97-98.
[9] 羅達. 基于兩步法的飲料塑料防盜瓶蓋切割機設計[J]. 機電工程, 2012, 29(7): 814-816.
[10] 朱加茂,彭運秋. 基于VB語言的異型泡沫塑料數控切割系統的開發[J]. 機電產品開發與創新, 2012, 25(5): 169-170.
[11] 王夕舉. 塑料型材牽引切割機氣動系統[J]. 液壓與氣動,1995(3):21-23.
[12] 龔真蕊. 管擠出設備穩定滾輪對管徑測量的影響研究[J]. 機械工程與自動化, 2013(3): 118-119.
[13] 張燕青,王騰飛,于云程. 一種自動切管機的設計[J]. 現代制造技術與裝備, 2018(1): 80-81.
[14] 黃云志. 塑料管道自動切割控制系統的設計[J]. 科技創新與應用, 2017(8): 115.
[15] 王文紅,郭琳. PLC在管材自動行星切割機中的應用[J]. 沙洲職業工學院學報, 2002, 5(2): 14-16.
[16] 高翔,周立峰. 塑料管材自動切割系統中定長切割和接口增厚功能的實現[J]. 計算機光盤軟件與應用, 2011(14): 56-57.
[17] 黎良田. 塑料管材自動切割控制系統的設計研究[J]. 塑料工業, 2016, 44(10): 53-55.
[18] 韓以倫,邱鵬程,姬光青,等. 基于PLC與液壓的塑料管材自動切割裝置的設計[J]. 制造業自動化, 2016, 38(6): 90-92, 116.

























 玻纖含量對長玻纖...
玻纖含量對長玻纖... 鈣鈦礦薄膜的均勻...
鈣鈦礦薄膜的均勻... 用于光伏板靜電除...
用于光伏板靜電除... 聚砜醫療干粉吸入...
聚砜醫療干粉吸入...





